
加拿大多伦多大学刘新宇团队另辟蹊径,用化学方法把活体秀丽隐杆线虫 “大脑” 与肌肉系统的连接切断,再利用光遗传学和微机器人控制技术实现对单个活体线虫爬行状态的闭环控制,可一次性灵活穿越微型迷宫。

图|活体线虫爬行状态闭环控制显微视图(来源:受访者)
近年来,直接利用微生物运动或生物组织来构建生物融合微机器人(又称为类生命机器人)颇具应用前景,在药物控制传递、细胞内细胞器表征和精密医疗手术等技术已有了重要的应用场景。
然而,微型机器人的设计,在一定程度上受到驱动机构和高密度能源无缝集成等技术瓶颈限制,这种微型机器人的集成度和性能还无法与生物有机体相媲美。
在传统的微机器人领域,有很多课题组基于机器仿生原理,利用微装配、原位生长或生物打印等技术,将机器人微结构本体和具有驱动功能的细胞或组织集成,实现生物融合机器人。但这种仿生机器人在微米尺度下,粘性力和摩檫力通常比重力高几个数量级,这对微型机器人机体结构和执行器的设计、制造和材料开发带来了较大的困难。
该团队提出了一种基于线虫光遗传学的设计策略,利用活体秀丽隐杆线虫作为 “微机器人本体”,将线虫肌肉细胞作为 “驱动器”,通过可控微结构光场对线虫的蛇形运动实现闭环控制。

图|活体线虫软体微型机器人光遗传运动控制原理示意图(来源:受访者)
相关论文以为题《通过光遗传运动控制秀丽隐杆线虫的活体软微型机器人》(Toward a living soft microrobot through optogenetic locomotion control of Caenorhabditis elegans)发表在 Science Robotics 上。
图|相关论文(来源:Science Robotics)
由加拿大麦吉尔大学机械工程系博士董先科担任第一作者,加拿大多伦多大学机械与工业工程系教授刘新宇担任通讯作者。
该成果可带来两方面研究价值,一是为微器人设计原理研究提供了新思路;二是活体线虫爬行控制技术有望赋能线虫生物学创新研究。
刘新宇教授向 DeepTech 表示,“我们的初衷是利用机器人技术对秀丽隐杆线虫进行爬行控制,将这个活体线虫变成一个可控的软体微机器人。”
在做该研究之前,该团队已经对秀丽线虫微操作领域研究多年,研发了针对自由爬行活体线虫的机器视觉识别和跟踪算法,全自动线虫显微注射系统,以及用于高速线虫筛选的微流控系统。
该研究成果具有两大突出亮点:
第一,该团队揭示了秀丽隐杆线虫能够持续向前蛇形爬行的驱动规律。线虫向前爬行的主要原因是,秀丽隐杆线虫如蛇形般的体形结构与它的肌肉收缩强度分布间存在一个相位差,从而通过从头部到尾部的依次肌肉收缩产生向前推动力,受推力作用活体秀丽隐杆线虫可以持续向前爬行。
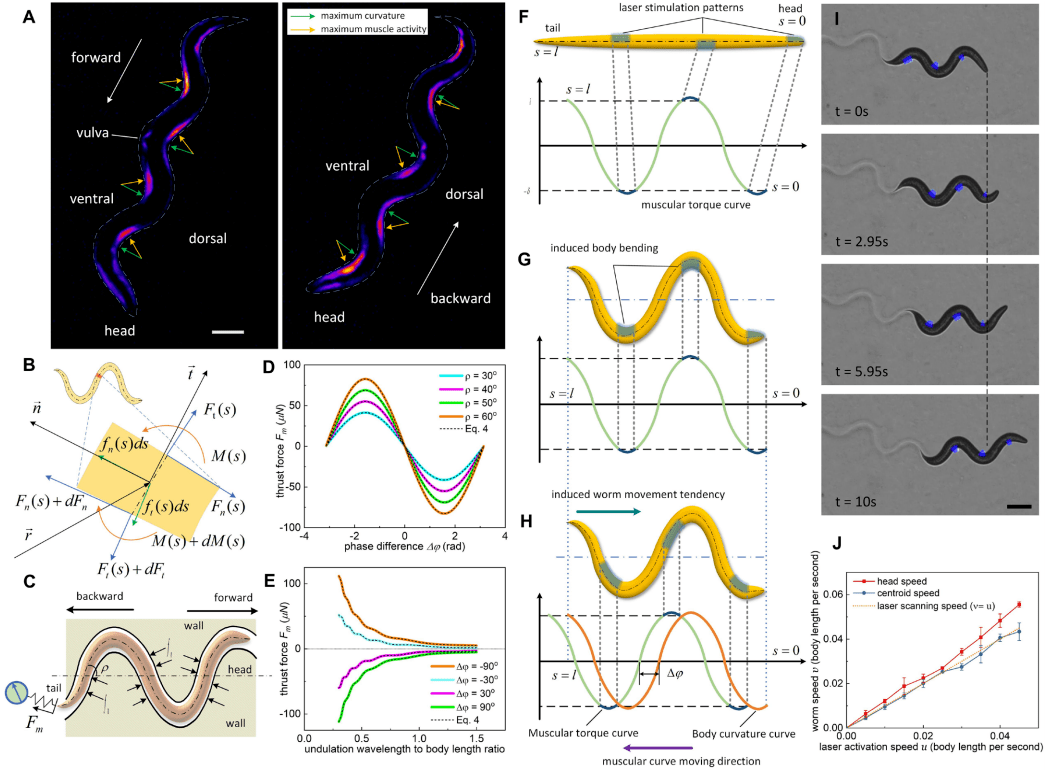
图|蛇形爬行的推力分析及微光场控制肌肉收缩推力再现(来源:受访者)
该团队通过对活体线虫爬行的荧光成像进行了观察,并对肌肉收缩时的钙信号增强做了荧光成像,发现了线虫肌肉收缩的最大值,然后又通过机械力学建模再次求证,实验证明 “蛇形相位差” 是秀丽隐杆线虫向前持续爬行的主要原因。
第二,如何通过机器视觉反馈控制算法实现秀丽隐杆线虫爬行闭环控制。该团队利用化学方法将活体秀丽隐杆线虫进行麻醉,把它的 “大脑”(即线虫的神经系统)与肌肉系统暂时切断,再利用光遗传学的办法,人为激励它身体不同部位的肌肉,让它的肌肉形成了一个对应的收缩分布,保持和体形结构的相位差,使它向前蛇形爬行。
然后,通过机器视觉算法对活体线虫的爬行进行跟踪,通过线虫的外轮廓对秀丽隐杆线虫进行激励,根据它所处的位置将分布的光打到它的身上,让活体线虫多个肌肉进行收缩,实时复现这样的相位差实现持续爬行。
值得关注的是,该团队对秀丽隐杆线虫实现了点对点的闭环位置控制和方向控制。
首先,可控制线虫从任意 A 点爬行至任意 B 点;其次,不论线虫初始爬行方向如何,都可以通过视觉反馈算法将他的爬行方向调整成想要的方向。通过给线虫规划一个爬行轨迹图,就能控制它一次性穿过一个微型迷宫,顺利到达目的地。
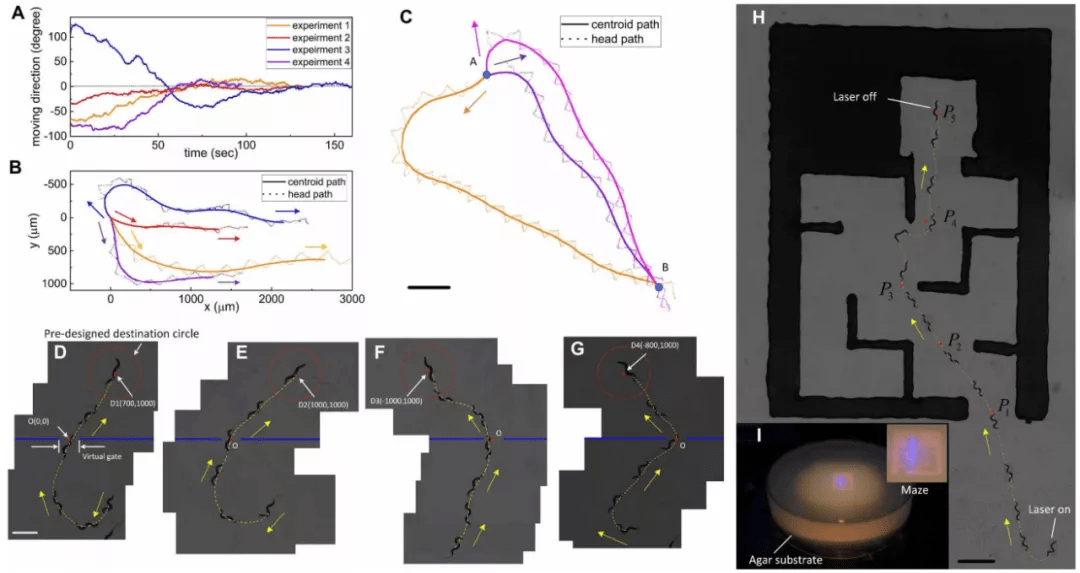
图|闭环控制对线虫移动方向和目的地的调控(来源:受访者)
刘新宇向 DeepTech 表示,利用秀丽隐杆线虫做研究的优势在于它是 “活体”,线虫身体中 “结构部件”、“驱动器”、“能源部件” 的高度无缝集成,为人们呈现了一种大自然设计的微机器人系统。
当然这类活体机器人,其劣势也比较明显,比如秀丽隐杆线虫与人类体内环境不兼容,因此会限制其在医疗上的应用。
另外,线虫在爬行的过程中也会疲劳,限制线虫微机器人的工作时间。一条活体线虫在光驱动受控状态下可保持爬行在 15 分钟左右,一旦控制超过 15 分钟,线虫肌肉细胞的收缩力就会变小,可控爬行就会受到影响。
可控秀丽隐杆线虫转基因变体的前期研究是一套非常复杂的流程,由于不同活体线虫对麻醉处理的反应差异,该论文中所报道的第一代活体线虫变体受控成功率相对较低,大概在 7% 左右。而定义是否 “成功” 的标准,是将线虫麻醉以后看它能否完全受控,如果它能受控就定义为成功;反之,则定义为失败。
刘新宇教授向 DeepTech 表示,为了提高活体秀丽隐杆线虫的受控成功率,当前该团队正在和加拿大多伦多西奈山研究所的 Mei Zhen 教授团队合作,对秀丽隐杆线虫转基因变体进行了改造升级,第二代线虫变体有望实现超过 50% 的控制成功率,这可以对这项技术的后续研究更有效率,也可以帮助对线虫生物学不熟悉的其他研究组更容易应用该项技术。
由于并不是所有微机器人学领域的实验室都熟悉或者都能做这样的实验,所以该团队后期考虑把这套平台的所有参数和技术做一个开源发表,将所有的实验细节公开,让机器人领域和生物学领域的研究者更方便使用。
“一旦新的科研成果被发表,我们会努力做好准备,争取为全球各个领域的研究组提供第二代活体线虫样品。突破科研技术难题,克服平台障碍,将此技术在不同学术领域推广,是我们未来几年的主要目标。” 刘新宇教授说道。
秀丽隐杆线虫的神经细胞只有 302 个,而且每一个神经细胞互相连接的图谱都已被研究清楚,科研人员可以通过高分辨率荧光成像办法去研究,活体线虫不同爬行为下神经细胞的信号传导机理,因此该研究成果可直接应用于基础神经科学研究,并且短期即可找到应用前景。
微米级机器人在医疗领域有很高的应用价值,比如可以在人体内自主行动,把药物精准地送到能发挥药效的地方,还可以辅助精子移动帮助人工受孕。
“然而,该成果短期内很难直接用于医疗领域,在解决行业痛点及大规模商业化落地上仍不成熟。比如,在临床应用中,目前很难将活体线虫植入人体做药物递送或其他应用,在技术和伦理层面面临一定的障碍。” 刘新宇表示。
第一,将活体线虫植入体内做药物提送,面临伦理障碍。秀丽隐杆线虫属于一种寄生虫,把它植入人体内做药物递送,从伦理或者从心理上患者对它的接受程度会有很大的障碍,在短期之内找到克服这个难题的解决方法具有一定挑战。
第二,秀丽隐杆线虫光驱动原理不适合体内应用,这是主要技术障碍之一。临床中利用的最多的是磁控和声控驱动,当机器人进到人体以后,磁场和声控都可以很容易将药物递送到更深的身体组织。由于秀丽杆线虫是基于光学驱动的,在技术层面上如何实现体内线虫光驱动,目前该团队持保守态度。
未来,该团队将会对秀丽隐杆线虫活体的基因结构进行改造,尤其是对它麻醉的过程做一个升级,使它的麻醉过程重复性更好,可以很大程度提高线虫控制的成功率,这是他们接下来主攻的一点;另外该团队将与 Mei Zhen 教授和其他生物线虫实验室合作,将该实验技术和平台应用到线虫基础生物学创新研究。
刘新宇向 DeepTech 表示,“我们团队在开始这项研究时,主要出于好奇心和兴趣驱动,至于最终研究成果适合哪些未来应用场景,可以解决哪些实际问题,当时并没有找到清晰路径。而且,基础科学研究与应用转化的先后顺序有时很难分清,只要我们保持好奇心,全力推动新知识产生和技术进步,很多开创性成果在之后的深入研究过程中,会找到意想不到的应用场景。”

图|刘新宇(来源:受访者)
开展本研究的过程中,该团队逐渐认识到所开发的活体线虫运动控制技术,在线虫生物学基础研究上的应用前景。例如,该技术将允许团队对线虫不同蛇形爬动模式下的生物力学原理进行试验测量和建模研究。
另外,该团队将和 Mei Zhen 团队进一步合作,深入研究线虫嗅觉、趋光、趋热等行为的神经生物学原理。
刘新宇向 DeepTech 表示,“如今,中国国内环境有一个非常独特的优势,科研与产业结合非常紧密,产业层面需求的反哺,使科研工作者的思路更加清晰。”
 金大立免费服务热线
金大立免费服务热线 地址:成都彭州市工业开发区天彭镇旌旗西路419号
地址:成都彭州市工业开发区天彭镇旌旗西路419号二维码
